
조백규 국민대 교수팀, 2026 로봇종합학술대회 '레드쇼' 우수상
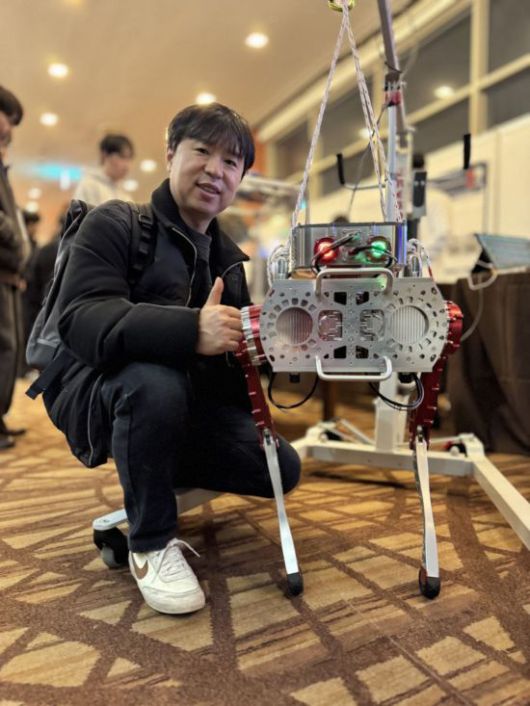 |
조백규 국민대 교수가 레드쇼 우수상을 받은 모듈형 이족보행 로봇을 소개하고 있다. 사진=백종민 테크 스페셜리스트 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
지난 6일 강원도 평창에서 열린 '2026 한국로봇종합학술대회(KRoC)'에서 레드쇼(RED Show) 일반 부문 우수상(한국로봇산업진흥원장상)을 받은 국민대 조백규 교수는 수상 직후 이렇게 말했다. 레드쇼는 학회 기간 중 국내 대학과 연구기관이 개발한 실제 로봇 시스템을 전시·시연하며 기술 완성도와 현장 적용 가능성을 평가하는 기술 시연 중심 프로그램이다.
조 교수 연구팀이 선보인 '지상·수중 환경에서 운용이 가능한 모듈형 2족 보행 로봇'은 단순한 실험용 플랫폼을 넘어 실제 산업 현장을 겨냥한 로봇이다.
이 로봇은 두 발로 서 있지만, 전통적인 휴머노이드 형태는 아니다. 4 족 로봇의 상체를 분리한 듯한 구조이지만, 두 다리만으로 보행이 가능하다. 조 교수는 현장에서 균형 제어 성능을 직접 시연하며 "발로 밀어보시라"고 말했다. 외부 충격에도 로봇은 비틀거리면서 자세를 회복하며 균형을 유지했다.
조 교수는 "4 족이 안정적인 것은 맞지만 우리는 모듈형 접근을 택했다"고 말했다. 해당 로봇은 두 대를 결합해 4 족 로봇으로 변환할 수 있다. 좁은 공간에서는 2족으로 이동하고, 필요시 합체해 안정성을 확보하는 방식이다.
이 로봇의 가장 큰 특징은 방수 설계다. 수중 환경에서도 운용이 가능해 지상과 물이 공존하는 환경, 특히 세척과 점검이 동시에 요구되는 산업 현장에서 활용 가능성을 보여줬다. 먼지나 오염이 많은 작업장에서도 사용하기에 적합하다는 설명이다.
조 교수는 "현재 한수원과도 적용 가능성을 논의 중"이라며 발전 설비 점검 등 특수 환경 투입 가능성을 언급했다. 그는 "공간이 매우 협소한 구간에서는 기존 4 족 로봇이 들어가기 어렵다. 2 족 구조가 오히려 유리하다"고 설명했다.
확장 개념은 더욱 열려 있다. 조 교수는 "합체 대상은 같은 로봇일 필요는 없다. 수레형 플랫폼과 결합하거나, 상부에 로봇 팔을 장착해 물자를 바로 내리는 형태도 가능하다. 무엇을 붙이느냐에 따라 전혀 다른 임무 로봇이 된다"고 부연했다.
조 교수는 로봇 개조 작업을 진행 중이다. 바퀴 모듈을 적용한 기동성 개선 업그레이드가 진행되고 있으며, 향후에는 액추에이터까지 자체 개발해 방수성과 출력 성능을 동시에 확보할 계획이다.
평창=백종민 테크 스페셜리스트 cinqange@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
