
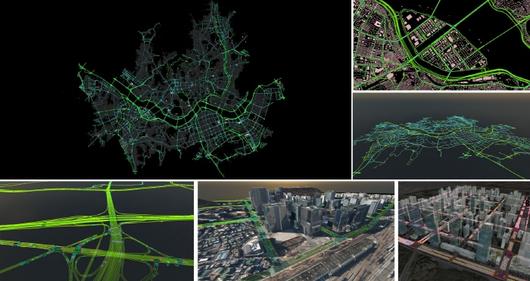
네이버랩스가 서울시 전역의 4차선 이상의 주요 도로를 정밀 데이터화한 로드 레이아웃 지도를 공개했다.
이번에 공개한 로드 레이아웃 지도는 서울시 전역의 2,092km 길이의 도로를 대상으로 노면 기호를 포함해 차선 단위 수준의 세밀한 정보를 담고 있다. 따라서 내비게이션부터 자율주행기술에 이르기까지 활용도가 무궁무진하다.
서울시 3D 모델링 지도는 네이버랩스의 하이브리드HD매핑(hybrid HD mapping) 솔루션을 통해 4차선 이상의 주요 도로만 추출해 데이터화했다. 인공지능(AI)와 비전(vision) 기술을 활용해 도로 정보 데이터를 노면기호 분류 작업을 자동화했다.
 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
이번 로드 레이아웃 지도는 도로 자체에 특화된 데이터다. 앞서 공개한 3D 모델링 지도가 AR 서비스 또는 도시 계획용 시뮬레이터·모니터링 등에 활용할 수 있는 특정 지역이나 공간 전체를 3D화한 데이터다.
로드 레이아웃지도는 차선 단위의 상세한 구조와 노면 기호 정보를 담고 있다. 차선 단위 정교한 교통량을 파악하거나 내비게이션 등에 접목해 길 안내 정확도를 높일 수도 있다.
특히 네이버랩스가 CES2019서 선보인 3D AR HUD인 어헤드(AHEAD)나 ADAS(Advanced Driver Assistance System, 첨단운전자보조장치)에 접목하면 보다 안전하고 편리한 운전 경험 제공도 가능하다.
 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
이외에도 활용 가능성은 무궁무진하다. 네이버랩스의 MMS(Mobile Mapping System)인 R1을 통해 실시간으로 수집·업데이트하는 도로 상황을 결합하면, 자율주행기술에 필요한 고정밀지도(HD맵)가 탄생한다. 네이버랩스는 이렇게 구축한 상암·여의도·판교·마곡 지역의 HD맵 데이터 세트를 국내 연구자들에게 공개한 바 있다.
무엇보다 고정밀지도 그 자체가 자율주행차량이나 로봇이 실제 실외 공간에서 이동하기 위한 기반이 되는 가장 필수적인 ‘두뇌’이자 ‘센서’로 주목받는 만큼, 네이버랩스의 이번 레이아웃 지도 구축은 국내 자율주행 기술의 발전을 앞당길 수 있다.
한편 네이버랩스는 최근 성남시와 AI·자율주행 산업 발전을 위한 업무 협약을 맺고, 판교 지역의 3D 모델과 정밀도로 지도를 제작 및 도심 내 완전자율주행기술 개발과 연구 커뮤니티 확산을 위한 관련 제도 개선에도 상호 협력하기로 한 바 있다.
백종윤 네이버랩스 자율주행그룹 부문장은 “대규모 도시 단위의 3D 모델링과 HD맵을 제작할 수 있는 네이버랩스의 독보적인 기술 역량 수준은 국내를 넘어 글로벌에서도 그 경쟁력을 인정받고 있다”고 말했다.
네이버랩스가 공개한 3D 모델링 지도와 로드 레이아웃지도는 서울시 전역을 대상으로 진행해 공개한 3D 모델링 지도는 건물들의 일조권이나 조망권 확인부터 도심 내 가스관, 하수관 등을 확인하는 것 외에도, 건물과 건물 간 관계를 분석하거나 미세먼지를 줄이기 위한 도시바람길 시뮬레이션에도 활용 가능한 등 광범위한 공간 데이터다.
이에 기반해 도로를 특정한 뒤, 구축되는 로드 레이아웃 지도는 사람에게 더 편리한 이동 정보를 제공하는 ADAS, AR내비게이션 등에 활용 가능할 뿐 아니라, 장기적으로는 MMS 데이터와 결합 시 자율주행 기능이 탑재된 차량 또는 로봇의 이동에 필수적인 공간 데이터이기도 하다.
이제은 기자 itnews@
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
