
- 광주과기원, 보행자 경로 예측 시스템 개발
- 자율주행 및 서비스 로보틱스 분야 접목 기대
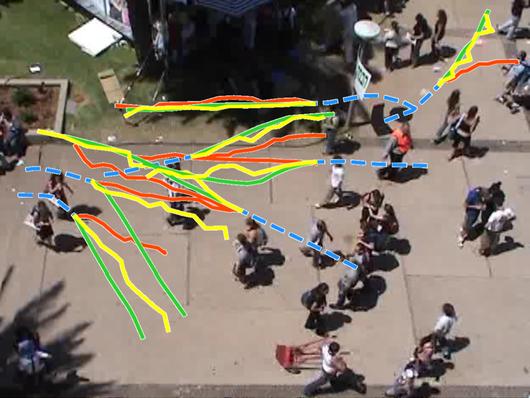 |
이번 연구결과 예시. 파란색: 입력 영상, 녹색: Ground-truth, 주황색: CVPR2020에 발표된 관련 분야 최신 연구 결과, 노란색: 제안된 방법으로부터 산출된 경로 예측 결과.[지스트 제공] |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
[헤럴드경제=구본혁 기자] 국내연구진이 보행자의 경로를 사전에 파악하는 기술을 개발, 자율주행차와 서비스 로보틱스에 상용화를 이끈다.
광주과학기술원(지스트) AI대학원 전해곤 교수 연구팀은 인공지능(AI) 기법을 이용한 정확한 보행자 경로 예측 알고리즘을 개발했다고 17일 밝혔다.
기존 방법론들은 일정한 구조를 갖는 딥러닝 네트워크를 통해 보행자간의 위치를 모델링해 보행가능 경로와 최종 도착지를 추론했다. 연구팀은 그래프 컨볼루션 네트워크를 이용해 보행자의 위치, 속도, 변위 등 다양한 정보를 모델링할 수 있는 새로운 형태의 딥러닝 구조를 제안했다.
그래프 컨볼루션 네트워크(GCN)는 객체들과 그 객체들 간의 관계로 표현되는 그래프 형태의 데이터를 학습할 수 있는 딥러닝 네트워크이. 장면 내 모든 보행자를 시공간 그래프로 형상화해 사회적 상호작용을 표현, 보행자 꼭짓점 간 강한 결속을 풀어 부분 그래프 집합을 만드는 방법을 도입해 효율성과 정확성을 높였다.
또한 기존 예측 방법과 달리 누적 오류를 보상하는 벡터를 통해 오버슈팅을 방지하고 본래의 목적지 방향으로 경로가 복구될 수 있도록 하는 새로운 방법론을 제시했다. 제안된 방법을 통해 기존 방법론들이 해결하지 못하는 보행자의 집단합류, 집단 움직임, 급격한 회전 등 복잡하고 다양한 형태의 경로 예측이 가능해졌다. 게다가 제안된 방법론의 네트워크 용량이 가벼워 실용화 관점에서도 그 우수성을 인정받았다.
전해곤 교수는 “그래프 기반의 네트워크 구조를 통해 보행자의 움직임을 다양한 관점에서 모델링했다는데 학술적 의미가 있다”면서 “딥러닝 기반 방법론 특유의 빠른 추론 속도와 제안한 알고리즘의 강인한 성능이 맞물려 보행자 경로 예측 기술의 실용화를 앞당길 것으로 기대된다”고 말했다.
이번 연구성과는 지난 5일 열린 인공지능 분야 국제학술대회 ‘AAAI Conference on Artificial Intelligence’에서 발표됐다.
nbgkoo@heraldcorp.com
- Copyrights ⓒ 헤럴드경제 & heraldbiz.com, 무단 전재 및 재배포 금지 -
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
