
'KIT-IRL'팀은 'Fodoson Rotaped 구조 기반 지형 대응형 모듈 로봇'을 출품해 대상을 수상했다. 재난·전쟁 상황에서 인간을 대신해 위험한 지역을 정찰·탐사해 다양한 정보를 수집하고 2차 피해를 예방하는 것이 목적인 탐사로봇이다.
 |
왼쪽부터 배성웅·백민재(앉은이)·김민석·이동형 학생 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
특히 이 로봇은 비평탄 및 복잡한 지형에서도 안정적 주행이 가능하도록 설계됐다. 캐터필러 형태 바퀴에 모터를 적용, 관절처럼 움직이는 'Fodoson Rotaped' 구조는 상황에 맞는 기능을 추가해 로봇의 높이보다 큰 장애물도 극복할 수 있는 모듈형으로 설계됐다. 기존 탐사로봇이 갖는 주행방식 한계를 극복했다는 평가를 받았다. 수상팀은 이번 경연대회에서 창의성, 지능성, 난이도, 완성도, 경제성 등 모든 부문에서 고르게 높은 평점을 받은 것으로 알려졌다.
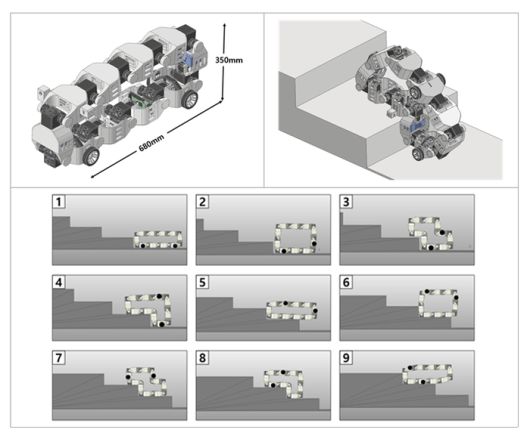 |
KIT-IRL팀이 제작한 'Fodoson Rotaped 구조 기반 지형 대응형 모듈 로봇 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
팀장을 맡았던 백민재 학생은 “이번 수상은 팀원들의 열정적인 협력과 주백석 지도교수님, 연구실 선배님들의 아낌없는 조언 덕분에 가능했다. 대회를 준비하며 얻은 값진 경험을 바탕으로 앞으로도 재난 대응과 인명 보호 등 사회적 가치를 실현할 수 있는 로봇 개발에 매진하겠다”고 말했다.
한편, 금오공대 지능로보틱스연구실은 로봇공학, 메카트로닉스 그리고 지능제어와 관련된 다양한 기술을 활용해 실제 현장에서 유용하게 사용 수 있는 로봇시스템을 연구 및 개발하고 있다. 최근 제4회 3D모델링디자인공모전 대상, 2024 창의적종합설계경진대회 산업통상자원부장관상, 3D프린팅비즈콘경진대회 대상 등 다수의 수상 실적을 이끌어냈다.
대구=정재훈 기자 jhoon@etnews.com
[Copyright © 전자신문. 무단전재-재배포금지]
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
