
 |
한국기계연구원 첨단생산장비연구본부 로봇메카트로닉스연구실 도현민 박사 연구팀이 달걀을 집거나 가위질을 하는 등 일상생활의 다양한 물체 및 도구 조작이 가능한 사람 손 크기의 '인간형 로봇 손'을 개발했다. 사진은 로봇손이 달걀을 집어 옮기고 있는 모습./사진제공=한국기계연구원 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
국내 연구진이 달걀을 집거나 가위질 등 일상생활의 다양한 물체 및 도구 조작이 가능한 사람 손 크기의 '인간형 로봇 손'을 개발했다.
이 로봇 손은 범용 구조로 제작돼 다양한 로봇 팔에 장착할 수 있고 무게 대비 쥐는 힘도 세계 최고 수준이어서 산업현장은 물론 일상생활까지 활용이 더 확대될 것으로 기대된다.
이 연구원의 첨단생산장비연구본부 로봇메카트로닉스연구실 도현민 박사 연구팀은 사람 손가락의 움직임과 구조를 모사해 같은 방식으로 물체를 조작할 수 있는 '인간형 로봇 손'을 개발했다고 22일 밝혔다.
이 로봇 손은 4개의 손가락과 16개의 관절로 이뤄졌다. 각 방향으로 움직일 수 있도록 12개의 모터가 적용됐다. 각각의 손가락은 독립적으로 움직인다.
연구팀은 로봇 손의 손가락을 사람의 손과 비슷한 수준으로 동작이 가능하도록 좁은 공간에서도 다자유도로 움직일 수 있는 메커니즘을 개발했다.
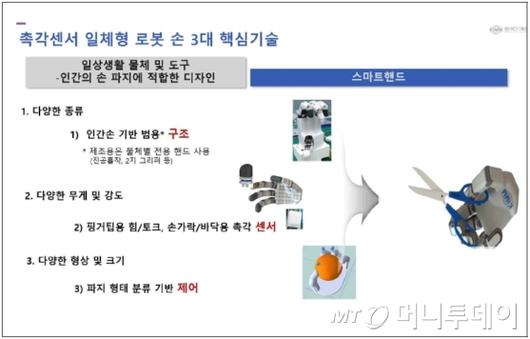 |
한국기계연구원 첨단생산장비연구본부 로봇메카트로닉스연구실 도현민 박사 연구팀이 달걀을 집거나 가위질을 하는 등 일상생활의 다양한 물체 및 도구 조작이 가능한 사람 손 크기의 '인간형 로봇 손'을 개발했다. 사진은 이 로봇손의 핵심기술달 개요도./사진제공=한국기계연구원 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
특히 손가락을 움직이는 구동부를 손바닥 내부에 장착해 모듈화에도 성공했다.
기존의 로봇 팔 구조를 변경할 필요 없이 로봇 손을 쉽게 장착할 수 있도록 제작해 활용도를 높인 것이다. 기존 상용 로봇 손 보다 가볍고 힘도 세다. 무게는 1㎏ 이하지만 3㎏ 이상의 물체를 들 수 있다.
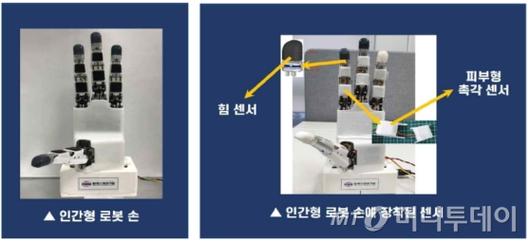
연구팀은 물체와 접촉을 감지할 수 있는 촉각 기능을 부여하기 위해 힘 측정 센서를 개발하고 손가락 끝과 마디, 손바닥에 장착했다.
손가락 끝에 장착된 힘 센서는 지름 15㎜, 무게 5g 이하의 초소형 센서로 로봇 손과 물체가 접촉할 때 손가락 끝에서 감지되는 힘의 크기와 방향을 측정할 수 있다. 물건을 쥐는 힘을 조절하는 핵심이다.
또 손가락 마디와 손바닥에는 서울대학교와의 공동연구를 통해 피부형 촉각 센서도 장착했다. 피부형 촉각 센서는 로봇 손과 물체의 접촉 시 접촉 부위의 분포와 힘을 측정한다.
 |
한국기계연구원 첨단생산장비연구본부 로봇메카트로닉스연구실 도현민 박사 연구팀이 개발한 세계 최고 수준의 '인간형 로봇 손'./사진제공=한국기계연구원 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
지금까지 개발된 상용 로봇 손의 경우 촉각센서가 내장돼 있으면서 동시에 손가락 구동부가 손바닥 내부에 장착된 모듈형 제품이 없어 활용에 한계가 있었다.
도현민 책임연구원은 "인간형 로봇 손은 사람 손의 섬세한 움직임을 모방해 우리가 일상생활에서 사용하는 도구 등 다양한 물체를 다루고자 개발했다" 며 "이 기술은 로봇 손의 '파지' 작업 알고리즘과 로봇의 조작 지능을 연구하기 위한 플랫폼으로도 활용될 수 있을 것"이라고 말했다.
대전=허재구 기자 .@.
<저작권자 ⓒ '돈이 보이는 리얼타임 뉴스' 머니투데이, 무단전재 및 재배포 금지>
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
