
 |
(사진=셔터스톡) |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
(사진=셔터스톡)로봇 시뮬레이터 무조코(Multi-Joint dynamics with Contact, MuJoCo)가 오픈소스로 공개된다. 구글 딥마인드는 무조코를 인수, 해당 시뮬레이터를 무료로 제공하겠다고 밝혔다. 개발자가 무료로 사용할 수 있는 시뮬레이터 영역이 확장되면서 로봇 개발 및 인공지능(AI) 강화학습 등이 유리해질 전망이다.
딥마인드는 18일(현지시간) 자사 블로그를 통해 "기술 발전의 일환으로 무조코를 인수해 어디에서나 자유롭게 연구할 수 있도록 조치를 취했다"며 "앞으로 허용 라이선스에 따라 오픈소스 소프트웨어(SW)로써 무조코를 지속 개선하겠다"고 발표했다.
무조코는 물리적 현상을 자연스럽게 나타내는 시뮬레이터로 유명하다. 딥마인드 측은 자사 로봇 팀이 그동안 다양한 프로젝트를 위한 시뮬레이션 플랫폼으로 무조코를 사용했다고 밝혔다.
무조코는 물리적 현상을 정확히 구현할 수 있는 장점이 있다. 게임, 영화에 등장하는 로봇·캐릭터 등을 제작하기 위해 만들어진 시뮬레이터가 물리적 특성까지 고려하지 못했다면, 무조코는 해당 기능을 구현해 현실성 있는 작업을 도와준다. 이 기술을 바탕으로 개발자는 로봇의 접촉 부위 세부 사항 등을 파악해 접촉으로 인한 물리적 피해를 사전에 방지하는 것이 가능하다.
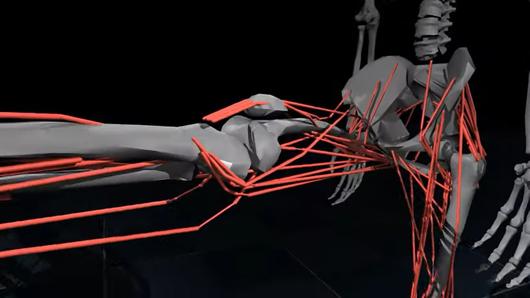 |
무조코 시뮬레이터는 로봇 접촉 부위 등 물리적 특성을 정확히 구현할 수 있는 장점이 있다. (사진=딥마인드) |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
무조코 시뮬레이터는 로봇 접촉 부위 등 물리적 특성을 정확히 구현할 수 있는 장점이 있다. (사진=딥마인드)비전 센서 등 비전 시뮬레이션을 지원해 다른 시뮬레이터 대비 효율적으로 시뮬레이션 환경을 수 있는 장점도 있다. 주요 엔진이 프로그래밍 언어 C로 작성돼 다른 아키텍처와의 연동·변환도 쉬운 편이다.
딥마인드 측은 블로그에서 "로봇 공학에서 시뮬레이션 연구를 하는데 있어 오픈소스 도구가 중요해졌다"며 "오픈소스 시뮬레이션 플랫폼을 개발·검증하고, 검증된 모델의 개방형 라이브러리를 구축하는 것을 목표로 하고 있다"고 밝혔다. 이어 "앞으로 무조코를 동급 최고 기능을 갖춘 무료 오픈소스 프로젝트로 개발하고 유지하기 위해 노력할 것"이라고 말했다.
AI타임스 김동원 기자 goodtuna@aitimes.com
[관련기사] 인간과 공존하는 AI 로봇...가정, 공장, 전쟁터에서 인간을 대신한다
[관련기사] "로봇·메타버스에서 미세한 손동작 활용 가능해진다"...서울대 이동준 교수팀 연구 성과
Copyright ⓒ '인공지능 전문미디어' AI타임스 (http://aitimes.com)
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
